

WpWeb Digital Agency » Soluzioni IT » Ricerca e Sviluppo » PLUTO-cookie-compliant
L’obiettivo del progetto PLUTO è quello di ispezionare in modo autonomo un tunnel ferroviario al fine di individuare le possibili zone che necessitano di manutenzione.
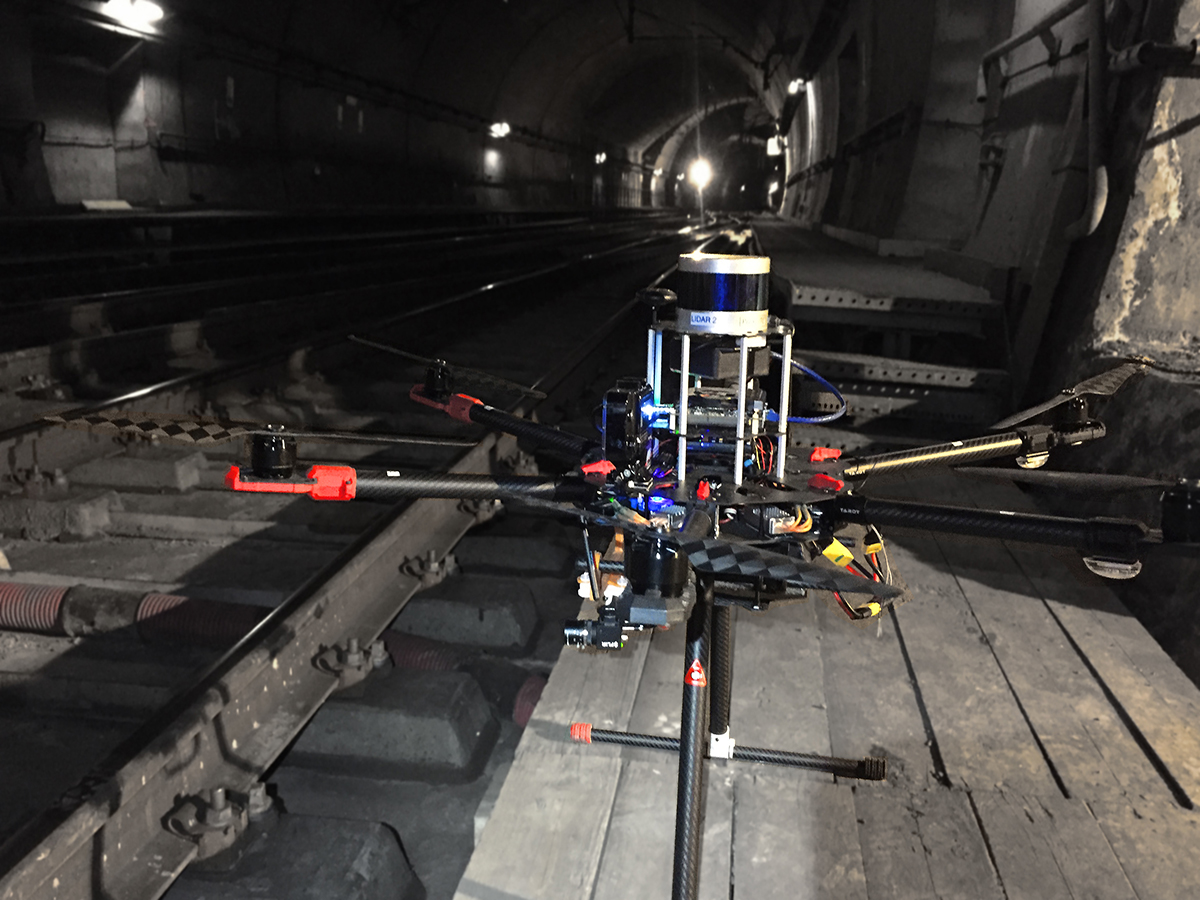
WPWEB, PMI innovativa con sede a Torino, ha realizzato interamente il progetto e si è occupata dell’implementazione di un drone e della sperimentazione del volo autonomo in ambienti confinati dove il segnale GPS è assente.
Il progetto PLUTO è stato sviluppato in risposta ad una challenge proposta dalla società delle ferrovie francesi (SNCF).
SNCF ha messo a disposizione il tunnel per l’attività di testing e dimostrazione del sistema.
Il progetto è promosso da CEA, ente pubblico di ricerca francese nel campo dell’innovazione tecnologica.
Il progetto PLUTO, attraverso il volo autonomo di un drone all’interno di un tunnel ferroviario, rappresenta un’innovazione per le operazioni di manutenzione all’interno di una galleria. Queste attività rientrano infatti nell’ambito di operazioni complesse che richiedono tempo, uomini addestrati e comportano un certo livello di rischio.
L’uso di un drone che percorre il tragitto autonomamente può costituire una valida soluzione per:
Grazie all’equipaggiamento a bordo del UAV è possibile effettuare operazioni di recupero e lettura dati in modo più accurato e veloce.
Infine, per mezzo dei sensori, del computer di bordo e di una rete neurale, si riescono a processare grandi quantità di informazioni, analizzarle e riconoscere automaticamente le zone deteriorate che necessitano di intervento manutentivo.



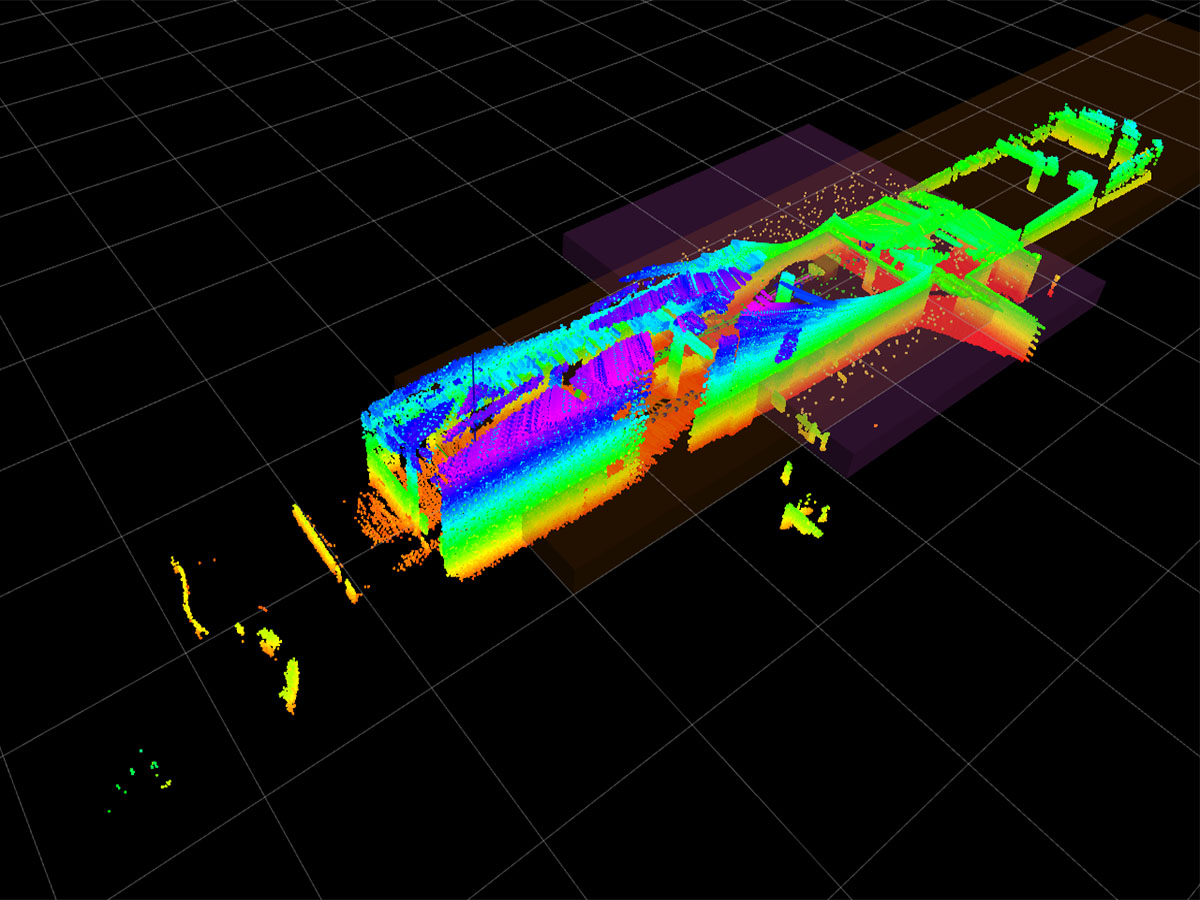
L’architettura del sistema è stata sviluppata tramite ROS (Robot Operating System) e si basa su un algoritmo di navigazione custom.
La pianificazione della missione è impostata attraverso una dashboard in cui un operatore setta i parametri del tragitto da percorrere.
Sempre tramite tale interfaccia è possibile monitorare i dispositivi a bordo del drone quali:
Il monitoraggio dei dispositivi di bordo è fondamentale per garantire che il drone ritorni sempre al punto di partenza, in totale autonomia e sicurezza, completando la missione impostata.
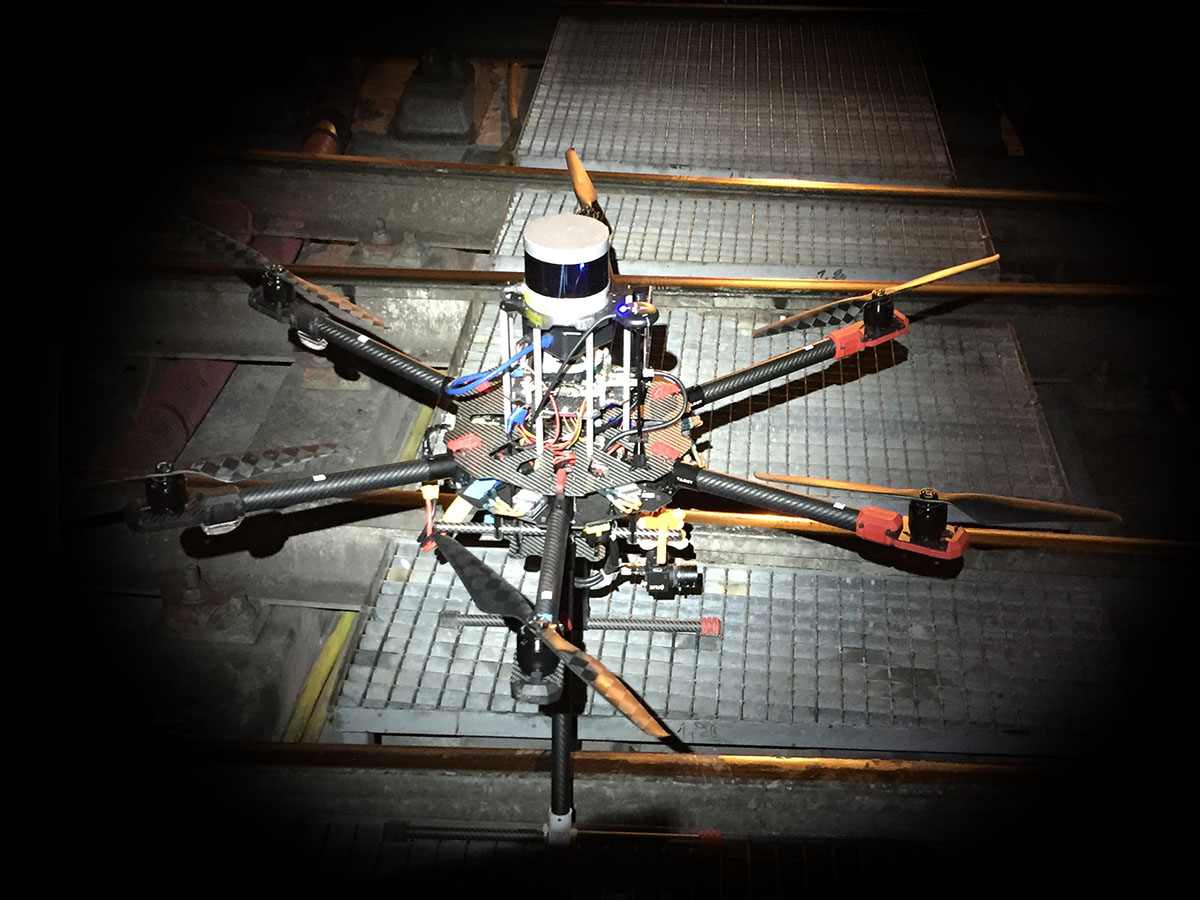
Il drone realizzato nell’ambito del progetto PLUTO è equipaggiato con: un computer ad alte prestazioni, fotocamere ad alta risoluzione, LIDAR, altimetro, bussola, giroscopio, GPS, IMU ad alta precisione.
Completa la strumentazione di bordo un sistema di illuminazione LED che permette di illuminare la galleria ed effettuare riprese migliori.

